近畿地区合同ロボコン2021
移動機構・回収機構・全体設計
1.参加概要
第14回近畿地区合同ロボットコンテスト2021に出場し、デザイン賞を獲得しました。
1-1.ルール概要
ルール名は「ロボコーンホール」です。1 VS
1の対決で相手よりも多くの点数を獲得したチームが勝利します。さらに決勝ラウンドではある一定の条件を競技中に達成すると得られる「Vゴール」が確認されると勝利が確定します。アメリカ発祥の「コーンホール」を参考にされており、ビーズが入った袋「ビーンバック」を射出したり、苗に見立てた箱を任意の場所に運んだりすると点数を獲得することができます。決勝ラウンドではこれらの動作を1回ずつ行ったことを確認したらVゴールを得られます。
新入生育成大会として位置づけられています。
1-2.ロボット概要
私たちは競技において、回収動作の多さに着目し、「位置合わせを素早くする」ことを最重用視していました。例えば、「苗の回収には電磁石での回収」「ビーンバックの回収には前後の位置がずれても問題ない」などのシステムとすることで目標を達成しました。大会を通してVゴールタイム(競技達成時間)はどの高専よりも速いロボットとなりました。
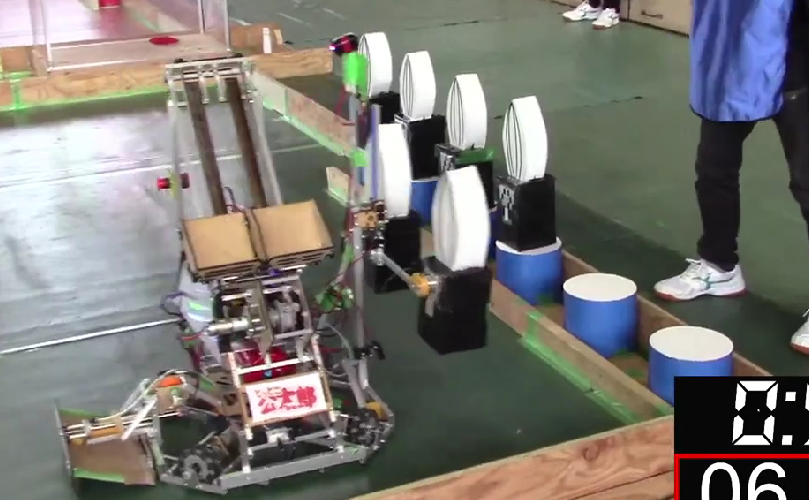
競技の様子
2.製作物
チーム内リソースの関係で、移動機構・回収機構・全体設計を担当しました。一つの機構は非常にシンプルなものとして、タスクオーバーにならないようにしました。
2-1.移動機構
振動の少なさ、グリップ力の観点からオムニホイールを採用しました。後からメンテナンスをするときに分解せずに直接ドライバーを中に通せるように、板に穴をあけるなどの配慮をしました。
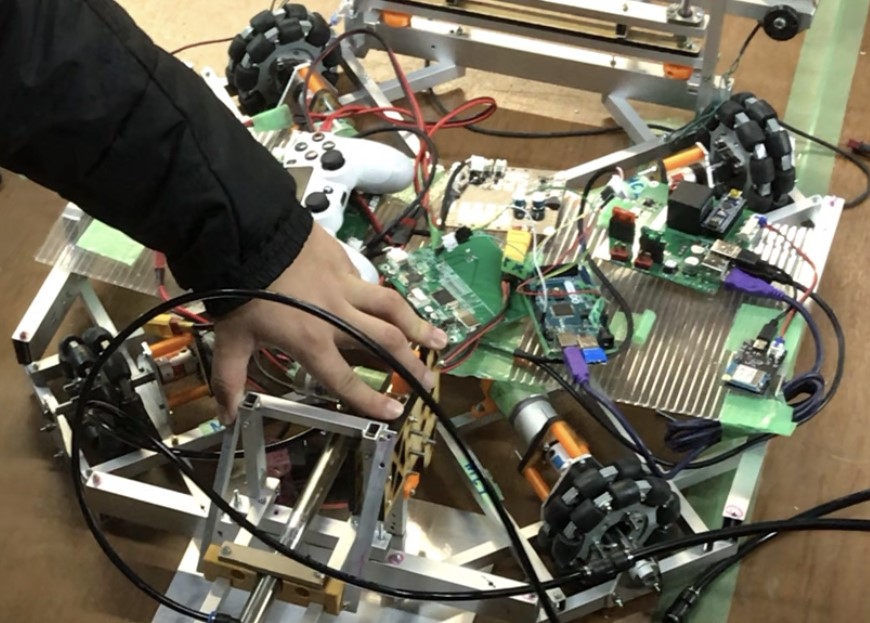
移動機構(オムニホイール)
2-2.回収機構
製作期間が2週間ほどであったため動作の安定性を出すために、空気圧のシリンダーを採用しました。競技中に位置合わせを誤る可能性があったため、多少の位置ずれを補填するために逆弁型のアームとしていました。これにより回収が完了するまで出し入れの動作を続けることで確実に回収ができます。
回収の様子
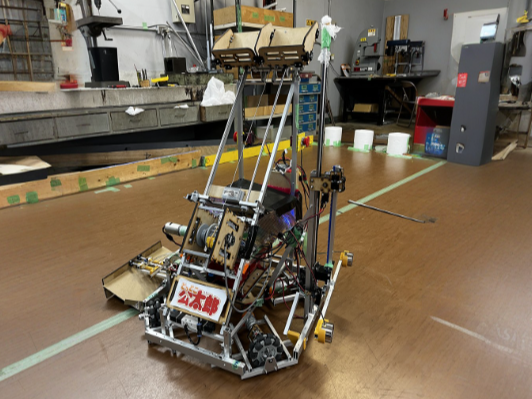
2-3.全体設計
事前に機械班内で全体設計の配置スケッチを行い、寸法などの打ち合わせを行いました。
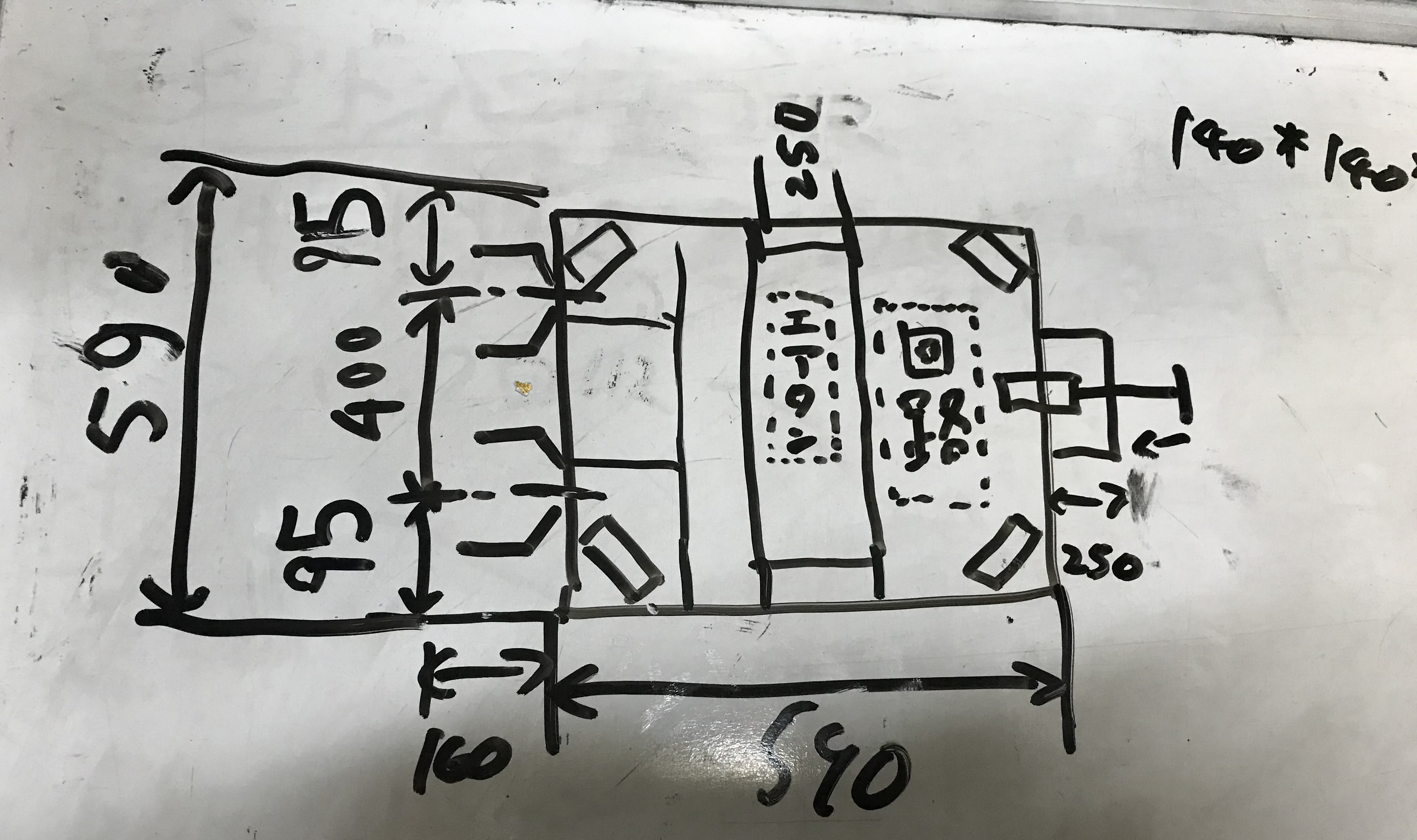
全体設計スケッチ
設計担当者と密に打ち合わせをすることで、全体的に低重心設計となり、コンパクトなデザインとなりました。また、このようなコンパクト設計が評価されてデザイン賞を獲得することができました。
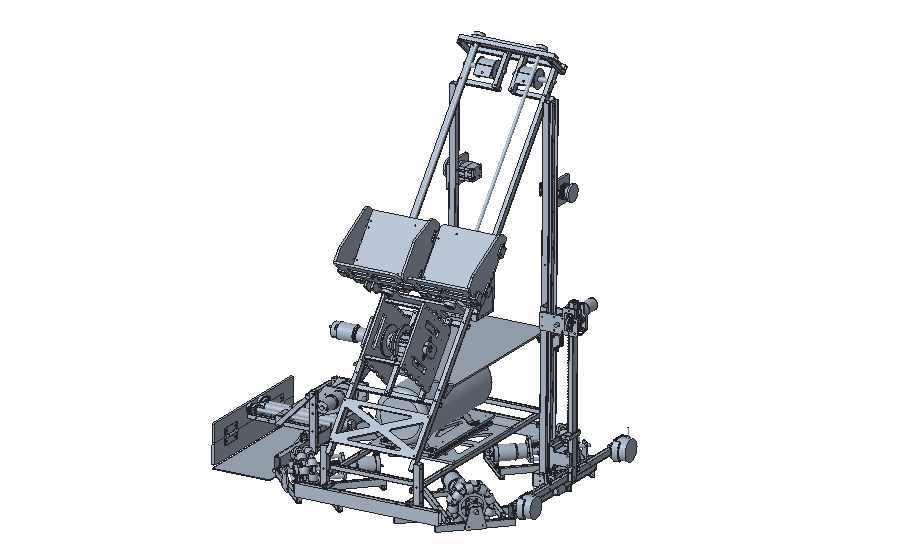
全体設計
3.競技の様子
青コートの大阪公大が私の所属していたチームです。(1:22:34-)
※スマートフォンで見ると時間がずれている場合があります。
く