高専卒業研究
倒立振子ロボット
研究背景
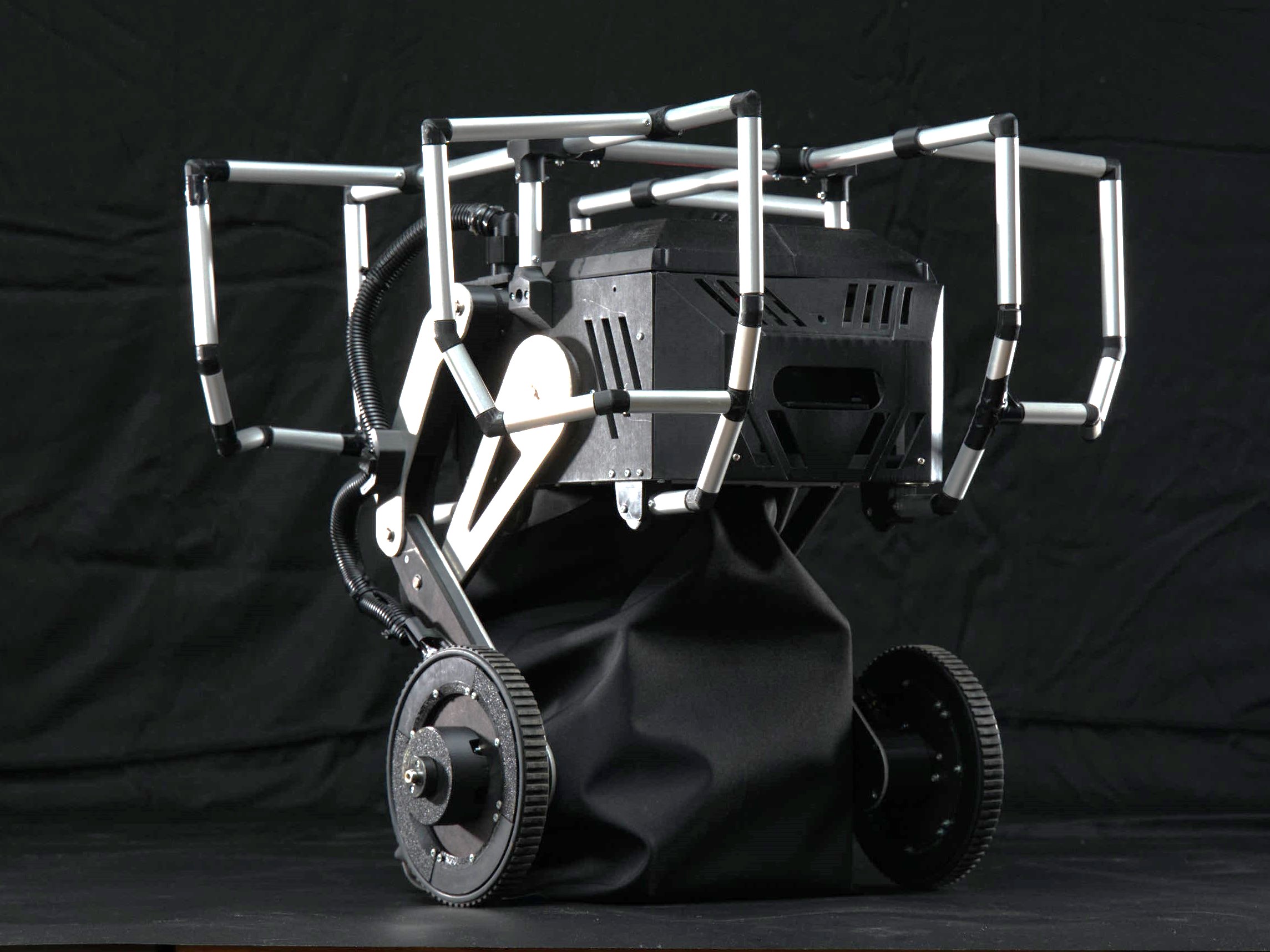
従来の関節付き倒立振子ロボットは静的に不安定のため、倒れやすいです。そのため、関節付き倒立振子と同様のシステムを維持しつつ、ロボットに自己復帰を促すフレームを新たに取り付けることで、どの方向に倒れても自己復帰が可能なロボットの開発を目指しました。
製作したもの
動画のような倒立振子ロボットを製作しました。また、自己復帰もすることができました。
倒立の様子
自己復帰の様子1
自己復帰の様子2
く